 平台热线
平台热线



人系统对故障现象进行分析, 再逐步缩小到相应 的单体设备上, 进而根据单体设备的原理采取对 应的解决措施。 电阻点焊机器人设备可认为由四 大部分组成, 分别为: ①机器人机械本体及其控 制器; ②焊枪与焊机; ③外部的水、 电、 气总成 单元; ④PLC交互系统。
1 FANUC伺服点焊机器人常见故障与排除
1.1 焊接低电流 机器人的自动焊接过程, 是由机器人执行 TP程序, 通过plc与焊接控制器 (以下简称WTC) 进行信号交互, 焊机执行对应焊接程序, 从而输 出的指定大小的焊接电流, 电流通过焊接电缆依次经过机器人底座接口、 机器人管线包线缆、 焊 枪变压器、 软连接、 电极臂、 电极柄、 电极帽, *后流向变压器负极形成电流回路; 主要组成部分如图1所示; 当硬件或者软件等出现问题时, 导致通过焊枪电极的电流小于设定值, 就会在电 极末端产生焊接低电流。
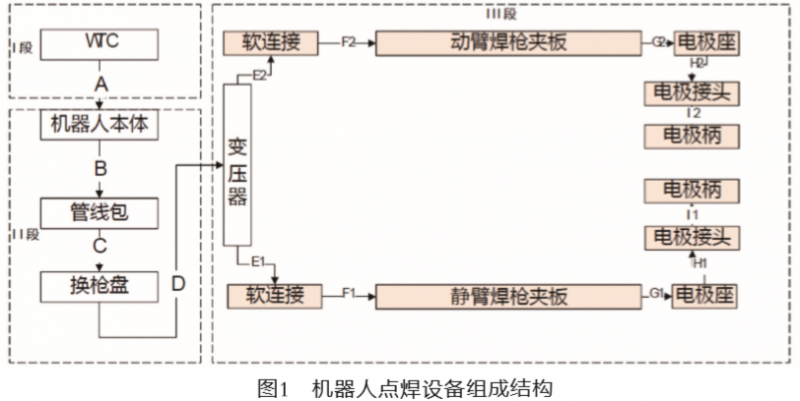
1.1.1 焊接低电流的表现 (1) 机器人在焊接过程中产生低电流报警 (机器人主要故障报警代码为SPOT-010); 机器人 报错无法自动运行。 (2) 焊点质量不合格, 因焊 接低电流产生脱焊、 虚焊等焊接质量问题。 1.1.2 排除焊接低电流的方法 出现低电流问题的原因, 可能是外部因素 (如板件油污、 离空过大)、 系统软件部分、 硬件 部分引起的, 处理故障时需要通过排除法逐步缩 小故障范围, 直至*终锁定故障点。
1.1.2.1故障排除流程 在机器人检测到低电流并产生报警时, 首先 在机器人示教器上面进行故障复位, 若不能恢复 自动焊接, 则进入生产线检查板件是否有杂质、 离空过大、 电极帽修磨端面是否良好等内容; 其 次, 则根据上图1所示焊枪系统结构, 依次从 WTC焊接电缆出线端、 焊枪变压器进线端、 电缆 接头是否松动、 进线电压是否正常、 线缆外观是 否磨损等方面进行检查, 以上因素都排除。
了解更多发那科机器人